rqt_console이란?
ROS2에서 log 메시지를 검사하는 데 사용되는 GUI 도구
실습
1. 설정
- 터미널 1
ros2 run rqt_console rqt_console
- 터미널 2
ros2 run turtlesim turtlesim_node
2. Messages on rqt_console
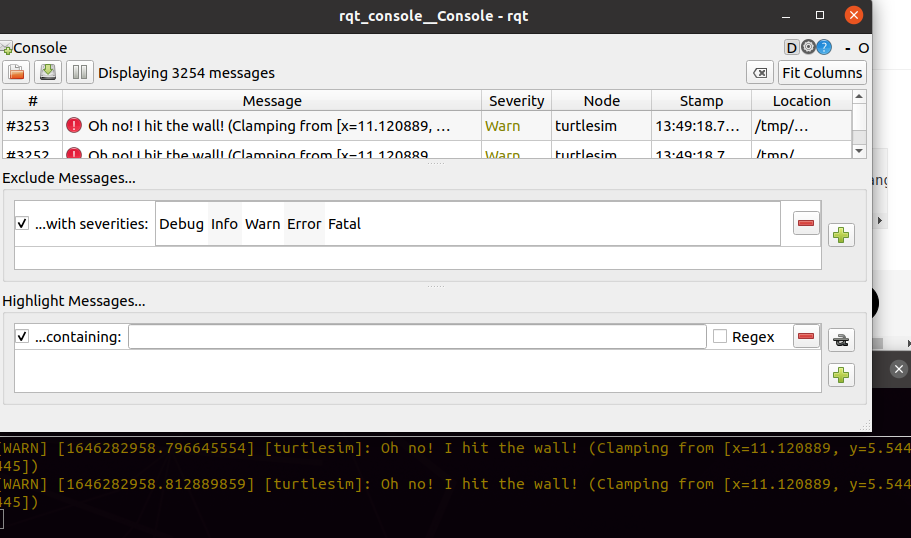
log 메시지를 만들기 위해 거북이를 벽에 부딪히게 한다.
- 터미널 3
ros2 topic pub -r 1 /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0,y: 0.0,z: 0.0}}"
아래의 사진처럼 터미널의 log가 rqt_console에 출력되는 것을 볼 수 있다.
3. Logger levels
- Fatal : 시스템이 손상되지 않기 위해 종료
- Error : 시스템을 반드시 손상시키지는 않지만 제대로 작동하지 못하게 하는 문제
- Warn : 기능에 해를 끼치지는 않지만 비이상적인 결과 / 심각한 문제 발생할 수 있음을 경고
- Info : 시스템이 예상대로 실행되고 있음을 시각적으로 확인하는 역할
- Debug : 시스템 실행의 전체 단계별 프로세스를 자세히 설명. 숨겨짐
3.1 Set the default logger level
아래와 같은 명령어를 사용하면 Warn 미만의 log는 출력되지 않는다.
Warn 대신에 Error를 쓰면 Warn log 메시지가 출력되지 않는다.
ros2 run turtlesim turtlesim_node --ros-args --log-level WARN'프로젝트 > ros2' 카테고리의 다른 글
| ROS2 foxy 튜토리얼12 - Creating your first ROS 2 package (0) | 2022.03.04 |
|---|---|
| ROS2 foxy 튜토리얼10 - Recording and playing back data (9는 건너뜀) (0) | 2022.03.04 |
| ROS2 foxy 튜토리얼7 - Understanding ROS2 actions (0) | 2022.02.24 |
| ROS2 foxy 튜토리얼6 - Understanding ROS2 parameters (0) | 2022.02.24 |
| ROS2 foxy 튜토리얼5 - Understanding ROS2 services (0) | 2022.02.24 |