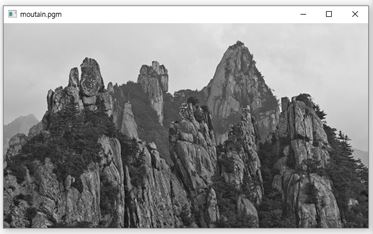
Input Image
SIFT
- SIFT란?
이미지의 크기와 회전에 불변하는 특징을 추출하는 알고리즘
Scale-Space
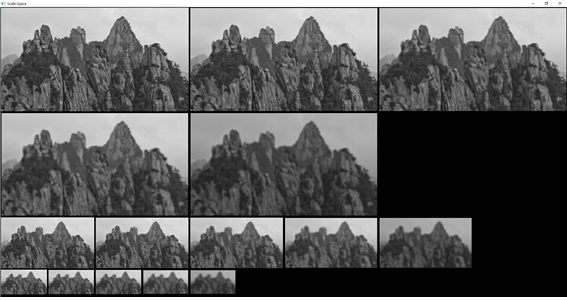
sigma : 1
DOG

result
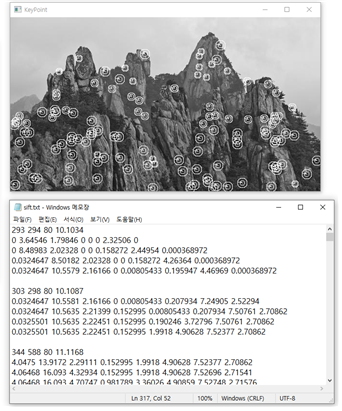
SIFT 특징을 찾고 DB 생성
Code
void MainFrame::on_button_GSS_DOG_clicked()
{
KImageGray icMain,Origin,Half1,Half2;
//포커스 된 ImageForm으로부터 영상을 가져옴
if(_q_pFormFocused != 0 && _q_pFormFocused->ImageGray().Address() && _q_pFormFocused->ID() == "OPEN")
{
icMain = _q_pFormFocused->ImageGray();
}
else
return;
KImageColor icMain2(icMain.GrayToRGB()), icMain3(icMain.GrayToRGB());
//Scale space 생성
double sigma = ui->Spinsigma->value();
KImageDouble igMain(icMain);
Origin = igMain.ToGray();
Half1 = igMain.HalfSize().ToGray();
Half2 = igMain.HalfSize().HalfSize().ToGray();
std::vector<std::vector<KImageDouble>> Octave(3); //Octave1,2,3
for(int j=0;j<5;j++)
{
//qDebug() <<"1";
Octave[0].push_back(Gaussian_Filter(Origin,sigma*pow(1.41,(j-1))));
//qDebug() <<"2";
Octave[1].push_back(Gaussian_Filter(Half1,sigma*pow(1.41,(j-1))));
//qDebug() <<"3";
Octave[2].push_back(Gaussian_Filter(Half2,sigma*pow(1.41,(j-1))));
}
//Dog
std::vector<std::vector<KImageDouble>> Dog(3);
for(int i = 0; i < 3;i++)
{
KImageDouble Dog_img(Octave[i][0].Row(),Octave[i][0].Col());
for(int octave=1;octave<5;octave++)
{
for(int ii=0;ii<Octave[i][0].Row();ii++)
{
for(int jj=0;jj<Octave[i][0].Col();jj++)
{
Dog_img[ii][jj] = Octave[i][octave][ii][jj]-Octave[i][octave-1][ii][jj];
}
}
Dog[i].push_back(Dog_img);
//qDebug() <<Octave[i][0].Row();
}
}
//KeyPoint & filtering
std::vector<std::vector<real_key>> KeyPoint = Find_Key_Point(Dog); //루트2 시그마, 2시그마
qDebug() << KeyPoint[0].size();
qDebug() << KeyPoint[1].size();
int x, y;
Orientation(KeyPoint,Octave[0],sigma); //orientation
KeyPoint_descriptor(KeyPoint,Octave[0],sigma);
for(int scale = 0; scale<KeyPoint.size(); scale++) //root 2 sigma, 2 sigma
{
for(int i=0;i<KeyPoint[scale].size();i++)
{
Mark_KeyPoint(icMain, KeyPoint[scale][i].magnitude, KeyPoint[scale][i].direction, KeyPoint[scale][i].x, KeyPoint[scale][i].y);
}
}
std::ofstream writeFile("sift.txt");
for(int i = 0; i<KeyPoint.size();i++)
{
for(int j=0;j<KeyPoint[i].size();j++)
{
//KeyPoint[i][j].x " " KeyPoint[i][j].y " " KeyPoint[i][j].direction " " KeyPoint[i][j].magnitude
//"\n"
writeFile << KeyPoint[i][j].x << " " << KeyPoint[i][j].y << " " << KeyPoint[i][j].direction << " " << KeyPoint[i][j].magnitude
<< "\n";
for(int f = 0;f<4;f++)
{
for(int r = 0; r<KeyPoint[i][j].feature[f].size();r++)
//KeyPoint[i][j].feature[f][r] " "
writeFile << KeyPoint[i][j].feature[f][r] << " ";
writeFile << "\n";
}
//"\n"
writeFile << "\n";
}
}
//show
ImageForm* q_pForm1 = new ImageForm(icMain, "KeyPoint", this);
_plpImageForm->Add(q_pForm1);
q_pForm1->show();
ImageForm* q_pForm2 = new ImageForm(Show(Octave), "Scale-Space", this);
_plpImageForm->Add(q_pForm2);
q_pForm2->show();
ImageForm* q_pForm3 = new ImageForm(Show(Dog), "Dog", this);
_plpImageForm->Add(q_pForm3);
q_pForm3->show();
}
KImageDouble Gaussian_Filter(KImageGray& icMain, double sigma)
{
KImageDouble Return(icMain);
int row = icMain.Row();
int col = icMain.Col();
int Gau_filter_size = 8*sigma + 1; //filter size
int size = std::sqrt(Gau_filter_size);
//qDebug()<<size;
double mask;
for(int ii = 0; ii<row;ii++)
{
for(int jj = 0; jj<col;jj++)
{
if(ii<size || ii>=row-size || jj<size || jj>=col-size)
{
Return[ii][jj] = 0;
continue;
}
mask = 0;
for(int i = -size; i<size+1; i++)
{
for(int j = -size; j<size+1;j++)
{
mask += std::exp(-0.5*((i*i+j*j)/(sigma*sigma)))*icMain[ii-i][jj-j];
}
}
Return[ii][jj] = (1/(2*M_PI*sigma*sigma))*mask;
}
}
//qDebug()<<"good";
return Return;
}
KImageGray Show(std::vector<std::vector<KImageDouble>>& Octave){
int octave_que_size = Octave.size();
int merged_row = Octave.front().front().Row() * 3;
int merged_col = Octave.front().front().Col() * Octave.front().size();
if (merged_col >= 1920) {
merged_col = 1920;
}
KImageGray Base(merged_row, merged_col);
std::vector<KImageDouble> img_vec;
KImageGray now;
int sum_of_prev_row = 0;
for(int octave = 0; octave<Octave.size();octave++)
{
img_vec = Octave[octave];
int img_vec_size = img_vec.size(); //6
int each_row = img_vec.front().Row(); //359
int each_col = img_vec.front().Col(); //640
int poor_column = 0;
for(int img = 0; img<img_vec_size;img++)
{
//qDebug()<<"ok";
now = img_vec[img].ToGray();
for(int i=0;i<each_row;i++)
{
for(int j =0; j<each_col;j++)
{
Base[i+sum_of_prev_row][j+(img-poor_column)*each_col] = now[i][j];
}
}
// 다음에 이어 붙일 이미지가 존재하지만 모니터의 가로 길이가 부족할 때 한 칸 아래로 내림
if (each_col - 1 + ((img - poor_column) + 1) * each_col > merged_col && img + 1 < img_vec_size)
{
sum_of_prev_row += each_row;
poor_column = img + 1;
}
//qDebug()<<"end";
}
sum_of_prev_row += each_row;
}
return Base;
}
bool IsPeak(std::vector<KImageDouble>& Dog_Scale,int i,int ii, int jj)
{
if(Dog_Scale[i][ii][jj]<0.03) return false;
if(Dog_Scale[i][ii][jj]>0) //극대
{
if(Dog_Scale[i][ii][jj]<Dog_Scale[i-1][ii-1][jj-1]||Dog_Scale[i][ii][jj]<Dog_Scale[i-1][ii-1][jj]||Dog_Scale[i][ii][jj]<Dog_Scale[i-1][ii-1][jj+1]||
Dog_Scale[i][ii][jj]<Dog_Scale[i-1][ii][jj-1]||Dog_Scale[i][ii][jj]<Dog_Scale[i-1][ii][jj]||Dog_Scale[i][ii][jj]<Dog_Scale[i-1][ii][jj+1]||
Dog_Scale[i][ii][jj]<Dog_Scale[i-1][ii+1][jj-1]||Dog_Scale[i][ii][jj]<Dog_Scale[i-1][ii+1][jj]||Dog_Scale[i][ii][jj]<Dog_Scale[i-1][ii+1][jj+1]||
Dog_Scale[i][ii][jj]<Dog_Scale[i][ii-1][jj-1]||Dog_Scale[i][ii][jj]<Dog_Scale[i][ii-1][jj]||Dog_Scale[i][ii][jj]<Dog_Scale[i][ii-1][jj+1]||
Dog_Scale[i][ii][jj]<Dog_Scale[i][ii][jj-1]|| Dog_Scale[i][ii][jj]<Dog_Scale[i][ii][jj+1]||
Dog_Scale[i][ii][jj]<Dog_Scale[i][ii+1][jj-1]||Dog_Scale[i][ii][jj]<Dog_Scale[i][ii+1][jj]||Dog_Scale[i][ii][jj]<Dog_Scale[i][ii+1][jj+1]||
Dog_Scale[i][ii][jj]<Dog_Scale[i+1][ii-1][jj-1]||Dog_Scale[i][ii][jj]<Dog_Scale[i+1][ii-1][jj]||Dog_Scale[i][ii][jj]<Dog_Scale[i+1][ii-1][jj+1]||
Dog_Scale[i][ii][jj]<Dog_Scale[i+1][ii][jj-1]||Dog_Scale[i][ii][jj]<Dog_Scale[i+1][ii][jj]||Dog_Scale[i][ii][jj]<Dog_Scale[i][ii+1][jj+1]||
Dog_Scale[i][ii][jj]<Dog_Scale[i+1][ii+1][jj-1]||Dog_Scale[i][ii][jj]<Dog_Scale[i+1][ii+1][jj]||Dog_Scale[i][ii][jj]<Dog_Scale[i+1][ii+1][jj+1]) return false;
}
else
{
if(Dog_Scale[i][ii][jj]>Dog_Scale[i-1][ii-1][jj-1]||Dog_Scale[i][ii][jj]>Dog_Scale[i-1][ii-1][jj]||Dog_Scale[i][ii][jj]>Dog_Scale[i-1][ii-1][jj+1]||
Dog_Scale[i][ii][jj]>Dog_Scale[i-1][ii][jj-1]||Dog_Scale[i][ii][jj]>Dog_Scale[i-1][ii][jj]||Dog_Scale[i][ii][jj]>Dog_Scale[i-1][ii][jj+1]||
Dog_Scale[i][ii][jj]>Dog_Scale[i-1][ii+1][jj-1]||Dog_Scale[i][ii][jj]>Dog_Scale[i-1][ii+1][jj]||Dog_Scale[i][ii][jj]>Dog_Scale[i-1][ii+1][jj+1]||
Dog_Scale[i][ii][jj]>Dog_Scale[i][ii-1][jj-1]||Dog_Scale[i][ii][jj]>Dog_Scale[i][ii-1][jj]||Dog_Scale[i][ii][jj]>Dog_Scale[i][ii-1][jj+1]||
Dog_Scale[i][ii][jj]>Dog_Scale[i][ii][jj-1]|| Dog_Scale[i][ii][jj]>Dog_Scale[i][ii][jj+1]||
Dog_Scale[i][ii][jj]>Dog_Scale[i][ii+1][jj-1]||Dog_Scale[i][ii][jj]>Dog_Scale[i][ii+1][jj]||Dog_Scale[i][ii][jj]>Dog_Scale[i][ii+1][jj+1]||
Dog_Scale[i][ii][jj]>Dog_Scale[i+1][ii-1][jj-1]||Dog_Scale[i][ii][jj]>Dog_Scale[i+1][ii-1][jj]||Dog_Scale[i][ii][jj]>Dog_Scale[i+1][ii-1][jj+1]||
Dog_Scale[i][ii][jj]>Dog_Scale[i+1][ii][jj-1]||Dog_Scale[i][ii][jj]>Dog_Scale[i+1][ii][jj]||Dog_Scale[i][ii][jj]>Dog_Scale[i][ii+1][jj+1]||
Dog_Scale[i][ii][jj]>Dog_Scale[i+1][ii+1][jj-1]||Dog_Scale[i][ii][jj]>Dog_Scale[i+1][ii+1][jj]||Dog_Scale[i][ii][jj]>Dog_Scale[i+1][ii+1][jj+1]) return false;
}
return true;
}
std::vector<std::vector<real_key>> Find_Key_Point(std::vector<std::vector<KImageDouble>>& Dog)
{
double thres = 1.5;
double r = thres;
double b = pow(r+1,2)/r;
double Dxx,Dyy,Dxy;
double TrH, DetH;
double a;
real_key key;
std::vector<std::vector<real_key>> key_vec(2);
//scale = 0;
for(int dog = 0; dog<3; dog++){ //octave 별 dog 선택
for(int i=1;i<4;i++) //scale 변화
{
for(int ii=1;ii<Dog[dog][i].Row()-1;ii++)
{
for(int jj=1;jj<Dog[dog][i].Col()-1;jj++)
{
//qDebug() << dog <<" "<<ii<<jj;
if(IsPeak(Dog[dog],i,ii,jj)) //6개 이미지 넘겨줌
{
Dxx = Dog[dog][i][ii][jj+1]+Dog[dog][i][ii][jj-1]-2*Dog[dog][i][ii][jj];
Dyy = Dog[dog][i][ii+1][jj]+Dog[dog][i][ii-1][jj]-2*Dog[dog][i][ii][jj];
Dxy = ((Dog[dog][i][ii+1][jj+1]-Dog[dog][i][ii+1][jj-1]) - (Dog[dog][i][ii-1][jj+1] - Dog[dog][i][ii-1][jj-1]))/4.0;
TrH = Dxx + Dyy;
DetH = Dxx*Dyy - Dxy*Dxy;
a = TrH*TrH/DetH;
//qDebug() << Dxx<<" "<<Dyy<<" "<<" " <<Dxy<<" " << DetH;
if(DetH<=0) continue;
//if(a < b) KeyPoint[ii][jj] = 255;
if(a >= b) continue;
//KeyPoint
key.x = ii*pow(2,dog);
key.y = jj*pow(2,dog);
key.scale = i;
key_vec[i-1].push_back(key);
}
}
}
}
}
return key_vec;
}
void Orientation(std::vector<std::vector<real_key>>& KeyPoint, std::vector<KImageDouble> Octave_0,double sigma)
{
KImageDouble Scale_img;
int x,y;
double mag;
double phase;
double gau_kenel;
double bucket[36] = {0,};
int x_t,y_t;
int index;
double max = 0.;
int dir;
//int cnt = 1;
int KeyPoint_scale_size = 0;
for(int scale = 0; scale<KeyPoint.size(); scale++) //root 2 sigma, 2 sigma
{
Scale_img = Octave_0[scale+1]; //origin roo2, origin 2
sigma = sigma*pow(1.4,scale+1);
KeyPoint_scale_size = KeyPoint[scale].size();
for(int i=0;i<KeyPoint_scale_size;i++)
{
x = KeyPoint[scale][i].x;
y = KeyPoint[scale][i].y;
//16개 좌표 x+w_x, y+w_y
for(int w_x = -5; w_x < 6; w_x++)
{
for(int w_y = -5; w_y < 6; w_y++)
{
x_t = x+w_x;
y_t = y+w_y;
if(x_t>Scale_img.Row()-2||x_t<1||y_t>Scale_img.Col()-2||y_t<1) continue;
gau_kenel = 1./(2*M_PI*sigma*sigma) * exp(-0.5*(w_x*w_x + w_y*w_y)/(sigma*sigma));
mag = gau_kenel * sqrt(pow(Scale_img[x_t+1][y_t]-Scale_img[x_t-1][y_t],2)
+pow(Scale_img[x_t][y_t+1]-Scale_img[x_t][y_t-1],2));
phase = atan2(Scale_img[x_t][y_t+1]-Scale_img[x_t][y_t-1],
Scale_img[x_t+1][y_t]-Scale_img[x_t-1][y_t])*180/M_PI+180.0;
//if(phase>360) phase -= 360;
//if(phase<0) phase += 180;
index = phase/10;
bucket[index] += mag;
//qDebug() << scale << " " << i << " " << x << " " << y << " " << x_t << " " << y_t << " " << index << mag;
//qDebug() << index;
}
}
for(int b = 0; b<36; b++)
{
if(bucket[b]>max)
{
max = bucket[b];
dir = b*10;
}
qDebug()<< b << " " << bucket[b];
}
//qDebug()<< dir << " " << max;
for(int b = 0; b<36; b++)
{
if(bucket[b]>max*0.8&& b != dir)
{
KeyPoint[scale].push_back({KeyPoint[scale][i].x,KeyPoint[scale][i].y,(double)b*10,bucket[b]});
//qDebug()<< b << " " << bucket[b];
}
//qDebug()<< b << " " << bucket[b];
}
KeyPoint[scale][i].direction = dir;
KeyPoint[scale][i].magnitude = max;
//qDebug()<< cnt << " " << dir << bucket[8] << bucket[9];
//cnt++;
}
}
}
void KeyPoint_descriptor(std::vector<std::vector<real_key>>& KeyPoint, std::vector<KImageDouble> Octave_0,double sigma)
{
KImageDouble Scale_img;
int x,y;
double mag[81];
double phase[81];
double gau_kenel;
double bucket[8] = {0,};
int x_t,y_t;
//int cnt = 1;
int KeyPoint_scale_size = 0;
for(int scale = 0; scale<KeyPoint.size(); scale++) //root 2 sigma, 2 sigma
{
Scale_img = Octave_0[scale+1]; //origin roo2, origin 2
sigma = sigma*pow(1.4,scale+1);
KeyPoint_scale_size = KeyPoint[scale].size();
for(int i=0;i<KeyPoint_scale_size;i++)
{
x = KeyPoint[scale][i].x;
y = KeyPoint[scale][i].y;
//11개 좌표 x+w_x, y+w_y
for(int w_x = -4; w_x < 5; w_x++)
{
for(int w_y = -4; w_y < 5; w_y++)
{
x_t = x+w_x;
y_t = y+w_y;
if(x_t>Scale_img.Row()-2||x_t<1||y_t>Scale_img.Col()-2||y_t<1) continue;
gau_kenel = 1./(2*M_PI*sigma*sigma) * exp(-0.5*(w_x*w_x + w_y*w_y)/(sigma*sigma));
mag[(w_x+4)*8+w_y+4] = gau_kenel * sqrt(pow(Scale_img[x_t+1][y_t]-Scale_img[x_t-1][y_t],2)
+pow(Scale_img[x_t][y_t+1]-Scale_img[x_t][y_t-1],2));
phase[(w_x+4)*8+w_y+4] = atan2(Scale_img[x_t][y_t+1]-Scale_img[x_t][y_t-1],
Scale_img[x_t+1][y_t]-Scale_img[x_t-1][y_t])*180/M_PI+180.0;
}
}
//index = phase/45
for(int p = 0; p < 2; p++)
{
std::vector<double> dou_vec;
bucket[(int)phase[0+5*p]/45] += mag[0+5*p];
bucket[(int)phase[1+5*p]/45] += mag[1+5*p];
bucket[(int)phase[2+5*p]/45] += mag[2+5*p];
bucket[(int)phase[3+5*p]/45] += mag[3+5*p];
bucket[(int)phase[9+5*p]/45] += mag[9+5*p];
bucket[(int)phase[10+5*p]/45] += mag[10+5*p];
bucket[(int)phase[11+5*p]/45] += mag[11+5*p];
bucket[(int)phase[12+5*p]/45] += mag[12+5*p];
bucket[(int)phase[18+5*p]/45] += mag[18+5*p];
bucket[(int)phase[19+5*p]/45] += mag[19+5*p];
bucket[(int)phase[20+5*p]/45] += mag[20+5*p];
bucket[(int)phase[21+5*p]/45] += mag[21+5*p];
bucket[(int)phase[27+5*p]/45] += mag[27+5*p];
bucket[(int)phase[28+5*p]/45] += mag[28+5*p];
bucket[(int)phase[29+5*p]/45] += mag[29+5*p];
bucket[(int)phase[30+5*p]/45] += mag[30+5*p];
for(int b = 0;b<8;b++)
{
dou_vec.push_back(bucket[b]);
}
KeyPoint[scale][i].feature.push_back(dou_vec);
}
for(int p = 0; p < 2; p++)
{
std::vector<double> dou_vec;
bucket[(int)phase[45+5*p]/45] += mag[45+5*p];
bucket[(int)phase[46+5*p]/45] += mag[46+5*p];
bucket[(int)phase[47+5*p]/45] += mag[47+5*p];
bucket[(int)phase[48+5*p]/45] += mag[48+5*p];
bucket[(int)phase[54+5*p]/45] += mag[54+5*p];
bucket[(int)phase[55+5*p]/45] += mag[55+5*p];
bucket[(int)phase[56+5*p]/45] += mag[56+5*p];
bucket[(int)phase[57+5*p]/45] += mag[57+5*p];
bucket[(int)phase[63+5*p]/45] += mag[63+5*p];
bucket[(int)phase[64+5*p]/45] += mag[64+5*p];
bucket[(int)phase[65+5*p]/45] += mag[65+5*p];
bucket[(int)phase[66+5*p]/45] += mag[66+5*p];
bucket[(int)phase[72+5*p]/45] += mag[72+5*p];
bucket[(int)phase[73+5*p]/45] += mag[73+5*p];
bucket[(int)phase[74+5*p]/45] += mag[74+5*p];
bucket[(int)phase[75+5*p]/45] += mag[75+5*p];
for(int b = 0;b<8;b++)
{
dou_vec.push_back(bucket[b]);
}
KeyPoint[scale][i].feature.push_back(dou_vec);
}
}
}
}
void Mark_KeyPoint(KImageGray &igScale, double mag, double ori_deg, int pX, int pY){
double dX_circle , dY_circle;
int iX_circle, iY_circle;
double radius = 0;
int iX_dir, iY_dir;
double dX_dir, dY_dir;
double custom = 4;
int tmp = (int)(mag / custom);
if(tmp < 2 ){
radius = 5;
}
else if(tmp < 5){
radius = 7;
}
else if(tmp < 10){
radius = 8;
}
else{
radius = 10;
}
double theta_rad;
//Draw circle
for(int angle = 0; angle <= 360; angle+= 1){
theta_rad = (double)angle * 0.01745329; // 0.017453..=>1 / 180 * 3.14592; degree to rad
dX_circle = (double)pX - (double)(radius * cos(theta_rad));
dY_circle = (double)pY - (double)(radius * sin(theta_rad));
iX_circle = (int)dX_circle; iY_circle = (int)dY_circle;
if(iX_circle > 0 && iY_circle > 0 && iX_circle < (int)igScale.Row() && iY_circle < (int)igScale.Col()){
igScale[iX_circle][iY_circle] = 255;
}
}
//Draw Direction
for(int range = 0; range <= radius; range++){
theta_rad = ori_deg * 0.01745329; // 0.017453..=>1 / 180 * 3.14592; degree to rad
dX_dir = (double)pX - (double)(range * cos(theta_rad));
dY_dir = (double)pY - (double)(range * sin(theta_rad));
iX_dir = (int)dX_dir; iY_dir = (int)dY_dir;
if(iX_dir > 0 && iY_dir > 0 && iX_dir < (int)igScale.Row() && iY_dir < (int)igScale.Col()){
igScale[iX_dir][iY_dir] = 255;
}
}
}
typedef struct real{
int x,y;
double scale;
double direction = -1;
double magnitude = -1;
std::vector<std::vector<double>> feature;
}real_key;



























 r과 s matching
r과 s matching